Poniższe zasady mają zastosowanie w przybliżeniu:
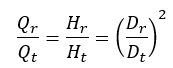
Q = natężenie przepływu
H = wysokość podnoszenia
D = średnica wirnika
r = indeks dla zredukowanej średnicy wirnika
t = indeks dla średnicy koła odniesienia
Na podstawie tej zależności można z grubsza wyznaczyć krzywą gazu H (Q).
Bardziej precyzyjne obliczenia wymagają jednak uwzględnienia map charakterystyk, w których do każdej krzywej charakterystycznej przypisana jest średnica wirnika. Nowy przebieg charakterystyki wyznaczany jest przez interpolację konwersji z charakterystyk sąsiednich. Aby w pełni wykorzystać wydajność procesu, zaleca się zapisanie mapy wirnika z co najmniej trzema krzywymi charakterystycznymi. Jeżeli istnieje duża różnica kalibracji pomiędzy najmniejszą i największą średnicą wirnika, wymagane są niektóre (2..4) charakterystyki pośrednie.
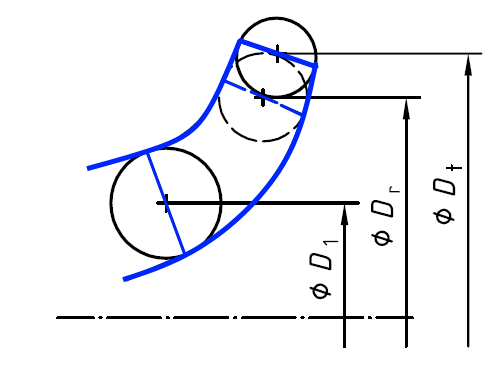
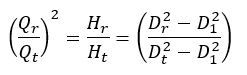
Alternatywna metoda obliczania jest opisana w ISO 9906. Wymagana jest tutaj znajomość średniej średnicy wirnika na krawędzi natarcia D
1 . Zgodnie z normą ta procedura obowiązuje przez
-
- Redukcja średnicy do maks. 5%
- Numer typu K ≤ 1,5
- niezmieniona geometria ostrza (kąt wyjścia, stożek itp.) po obrocie
D
1 = Średnia średnica na krawędzi natarcia wirnika
W przypadku pomp o numerze typu K ≤ 1,0 i maksymalnej redukcji średnicy wirnika 3% sprawność można uznać za stałą.

 2. Prawo modelowe
2. Prawo modelowe
 3. Prawo modelowe
3. Prawo modelowe
 Q – natężenie przepływu
H – głowica dostarczająca
P – pobór mocy
n – prędkość
Wskaźniki odnoszą się do odpowiedniej prędkości.
Prawa powinowactwa odnoszą się dokładnie do przepływów beztarciowych, nieściśliwych. W przypadku zastosowań technicznych należy je traktować jako rozwiązanie przybliżone.
Ogólnie rzecz biorąc, te prawa powinowactwa są niezależne od tego, jak zmiana prędkości jest technicznie realizowana. Tradycyjnie dla małych i średnich pomp wprowadzano stopniową zmianę prędkości poprzez zmianę uzwojeń. W międzyczasie zostały one w dużej mierze zastąpione przez przetwornice częstotliwości.
Wolnoobrotowe napędy elektryczne są bardzo drogie w przypadku większych pomp odśrodkowych, dlatego w takich przypadkach stosuje się przekładnie redukcyjne.
Silniki spalinowe są również wykorzystywane do użytku mobilnego. Mają one również zmienną prędkość w określonym zakresie.
Q – natężenie przepływu
H – głowica dostarczająca
P – pobór mocy
n – prędkość
Wskaźniki odnoszą się do odpowiedniej prędkości.
Prawa powinowactwa odnoszą się dokładnie do przepływów beztarciowych, nieściśliwych. W przypadku zastosowań technicznych należy je traktować jako rozwiązanie przybliżone.
Ogólnie rzecz biorąc, te prawa powinowactwa są niezależne od tego, jak zmiana prędkości jest technicznie realizowana. Tradycyjnie dla małych i średnich pomp wprowadzano stopniową zmianę prędkości poprzez zmianę uzwojeń. W międzyczasie zostały one w dużej mierze zastąpione przez przetwornice częstotliwości.
Wolnoobrotowe napędy elektryczne są bardzo drogie w przypadku większych pomp odśrodkowych, dlatego w takich przypadkach stosuje się przekładnie redukcyjne.
Silniki spalinowe są również wykorzystywane do użytku mobilnego. Mają one również zmienną prędkość w określonym zakresie.