Obowiązują następujące zasady:
1. Prawo modelowe

2. Prawo modelowe

3. Prawo modelowe

Q – natężenie przepływu
H – głowica dostarczająca
P – pobór mocy
n – prędkość
Wskaźniki odnoszą się do odpowiedniej prędkości.
Prawa powinowactwa odnoszą się dokładnie do przepływów beztarciowych, nieściśliwych. W przypadku zastosowań technicznych należy je traktować jako rozwiązanie przybliżone.
Ogólnie rzecz biorąc, te prawa powinowactwa są niezależne od tego, jak zmiana prędkości jest technicznie realizowana. Tradycyjnie dla małych i średnich pomp wprowadzano stopniową zmianę prędkości poprzez zmianę uzwojeń. W międzyczasie zostały one w dużej mierze zastąpione przez przetwornice częstotliwości.
Wolnoobrotowe napędy elektryczne są bardzo drogie w przypadku większych pomp odśrodkowych, dlatego w takich przypadkach stosuje się przekładnie redukcyjne.
Silniki spalinowe są również wykorzystywane do użytku mobilnego. Mają one również zmienną prędkość w określonym zakresie.

Krzywa krzywej pompy jest zakrzywiona i opada na wykresie od lewej do prawej wraz ze wzrostem natężenia przepływu. Nachylenie krzywej charakterystycznej zależy od konstrukcji pompy, aw szczególności od konstrukcji wirnika.
Cechą charakterystyczną krzywej pompy jest wzajemna zależność natężenia przepływu i wysokości podnoszenia.
Każda zmiana głowicy podającej zawsze powoduje zmianę natężenia przepływu.
Duże natężenie przepływu – & gt; niska głowa
Małe natężenie przepływu – & gt; duża głowa
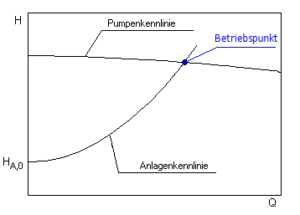
Chociaż tylko zainstalowany system rurociągów, ze względu na opór własny, dyktuje, jaki przepływ jest przenoszony przy danej wydajności pompy, dana pompa może zawsze przyjąć tylko jeden punkt pracy na swojej charakterystyce. Ten punkt pracy stanowi punkt przecięcia krzywej pompy z odpowiednią krzywą sieci rurociągów.
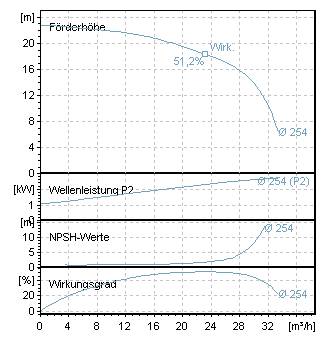
Oprócz charakterystyki Q-H, w pompach odśrodkowych często można znaleźć następujące krzywe charakterystyczne:
- wydajność
- Moc na wale P 2 (Q)
- Pobór mocy P 1 (Q) (często z zatapialnymi pompami silnikowymi i pompami mokrymi)
- wydajność
- Sprawność hydrauliczna η hydr (Q)
- Sprawność ogólna η tot (Q) (często z zatapialnymi pompami silnikowymi i pompami z mokrym wirnikiem)
- NPSH wymagane NPSH wymagane (Q)
- Prędkość n (Q)
& nbsp;

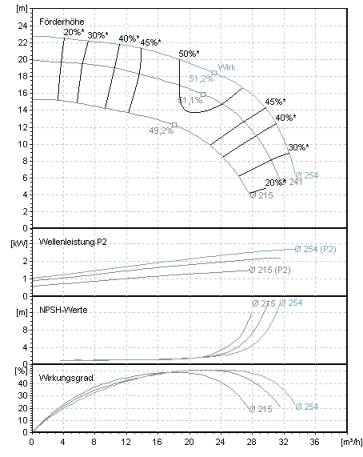
Charakterystyki poszczególnych pomp różnią się dokładnie jednym parametrem, takim jak
- Średnica wirnika
- Prędkość
- Kąt śmigła
- Liczba kroków
& nbsp;

Charakterystyka systemu składa się z części statycznej i dynamicznej.
H A = H A, 0 + H v (Q)
Charakteryzuje się głównie statyczną różnicą wysokości H Geo między poziomami cieczy w zbiorniku ssawnym i ciśnieniowym oraz stratami tarcia H v w całym układzie przepływu cieczy.
Składowa statyczna H A, 0 jest niezależna od natężenia przepływu (a tym samym od natężenia przepływu). Zawiera geodezyjną różnicę wysokości oraz różnicę ciśnień między zbiornikiem ssawnym i ciśnieniowym lub punktem wejścia i wyjścia rozpatrywanego systemu. Przy obiegach zamkniętych (np. obieg grzewczy) wysokość statyczna wynosi zawsze zero.
Część dynamiczna charakterystyki opisuje straty w rurach, które zależą od natężenia przepływu. W przypadku turbulentnego przepływu płynów NEWTON przy stałych współczynnikach strat elementów układu, krzywa charakterystyczna daje parabolę kwadratową. Jeśli znana jest wysokość statyczna i docelowy punkt pracy, charakterystyka systemu może być wyświetlana z wystarczającą dokładnością.
Jest on określany przez natężenie przepływu i wysokość podnoszenia przy odpowiedniej prędkości roboczej. Podczas pompowania mediów o dużej lepkości, charakterystyka pompy, a tym samym również punkt projektowy, przesuwa się w porównaniu z krzywą charakterystyki zarejestrowaną dla wody.

Nominalna wysokość podnoszenia dla konstrukcji pompy składa się z:
- wysokość statyczna (statyczna = niezależna od natężenia przepływu)
- Różnica wysokości między poziomem cieczy po stronie ssawnej i tłocznej (wysokość geodezyjna)
- Różnica ciśnień między zbiornikami ciśnieniowymi i ssącymi (przy zamkniętych zbiornikach)
- prawdopodobnie wymagane ciśnienie wylotowe
- wielkość strat spowodowanych stratami ciśnienia w systemie rurociągów w zależności od natężenia przepływu
Użyteczna praca mechaniczna przenoszona z pompy na pompowaną ciecz, oparta na sile ciężaru, nazywana jest wysokością podnoszenia H pompy. Przy stałej prędkości n i stałym natężeniu przepływu Q jest ona niezależna od gęstości pompowanej cieczy, ale zależna od jej lepkości.
Można ją obliczyć dzieląc różnicę ciśnień przez gęstość pompowanego medium i lokalną stałą grawitacyjną.
W przypadku cieczy newtonowskich wysokość podnoszenia można uwzględnić dla lepkości kinematycznych poniżej 20 mm²/s niezależnie od pompowanego medium. Z tego powodu szczególnie nadaje się do wyświetlania krzywej charakterystycznej pomp odśrodkowych.
Podczas pompowania wody wartość wysokości podnoszenia jest równa ciśnieniu w metrach słupa wody.
Przy projektowaniu pompy szczególnie ważna jest maksymalna i minimalna temperatura tłoczonego medium. Są one brane pod uwagę przy doborze materiałów i uszczelnień oraz, jeśli to konieczne, w teście odporności na media.
Właściwości fizyczne medium (gęstość, lepkość) zmieniają się wraz z temperaturą. Zapotrzebowanie na moc pompy jest wprost proporcjonalne do gęstości. Dlatego należy wziąć pod uwagę temperaturę z zakresu roboczego z maksymalną gęstością. Ponadto dla mediów lepkich (ν > 10 mm²/s) należy przekonwertować przebieg charakterystyk pompy.
Ten punkt jest również nazywany punktem projektowym (BEP = punkt najlepszej wydajności) pompy. Położenie punktu zmienia się wraz ze zmianą parametrów hydraulicznych pompy, takich jak średnica wirnika lub prędkość lub lepkość pompowanego medium.
Celem optymalnego doboru pompy jest to, aby pompa pracowała w punkcie projektowym tak, aby osiągnąć maksymalną sprawność.