r 5/2 Pięciominutowy deszcz, którego statystycznie należy się spodziewać raz na 2 lata r 5/100 Pięciominutowy deszcz, którego statystycznie należy się spodziewać raz na 100 lat
Jako przykłady podano wartości dla wielu niemieckich miast w normie DIN 1986-100. Wartości różnią się od r 5/2 = 200 do 250 l / (s ha) lub r 5/100 = 800 l / (s ha) [1 ha = 10000 m²]. Informacje o zdarzeniach deszczowych można uzyskać od lokalnych władz lub alternatywnie od Niemieckiej Służby Pogodowej. Wartości odniesienia podano w DIN EN 1986-100 Załącznik A. W przypadku braku wartości należy przyjąć r T (n) = 200 l / (s ha). Ze względów ekonomicznych i w celu zapewnienia zdolności do samooczyszczania systemy przewodów i związane z nimi elementy systemu kanalizacji deszczowej należy zwymiarować pod kątem średniej wielkości opadów. Obliczony deszcz mieści się w zakresie normy DIN 1986-100 jako wyidealizowane zdarzenie deszczowe (deszcz blokowy) o stałym natężeniu deszczu przez 5 minut. Jednoroczność (T n ), która ma być stosowana w każdym przypadku dla przypadku projektowego, jest określona przez zadanie. Zdarzeń deszczu powyżej obliczonego deszczu (r 5/2 ) należy się spodziewać zgodnie z planem.
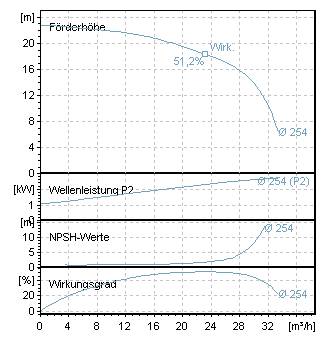
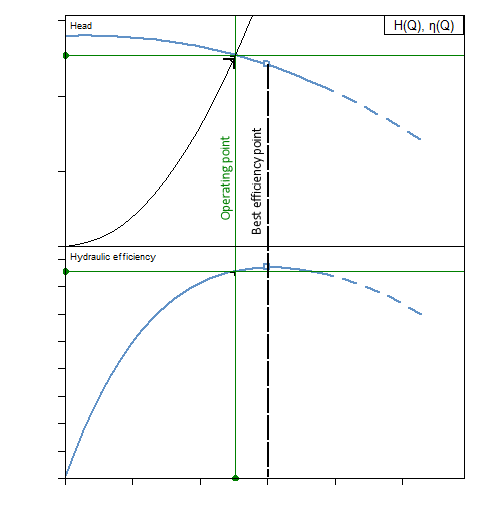
 Oprócz charakterystyki Q-H, w pompach odśrodkowych często można znaleźć następujące krzywe charakterystyczne:
Oprócz charakterystyki Q-H, w pompach odśrodkowych często można znaleźć następujące krzywe charakterystyczne:
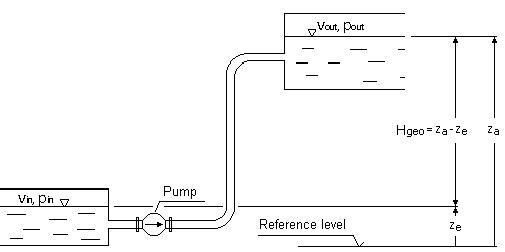
 p in , p out = ciśnienia podczas zasysania lub odprowadzania poziomów cieczy
ρ = gęstość cieczy
g = przyspieszenie ziemskie (9,81 m / s²)
H geo = statyczna różnica wysokości między poziomem cieczy w zbiorniku po stronie ssawnej i tłocznej
H l, tot = całkowita strata tarcia w rurze między wlotem a wylotem
v in , v out = średnie prędkości przepływu w zbiornikach po stronie ssącej i tłocznej
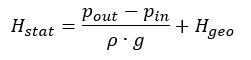
Zgodnie z prawem ciągłości, średnie prędkości przepływu w zbiornikach po stronie ssącej i ciśnieniowej są przeważnie nieznacznie małe i mogą być pominięte, jeśli powierzchnie zbiorników są stosunkowo duże w porównaniu z powierzchniami rurociągów. W tym przypadku powyższy wzór jest uproszczony do:
p in , p out = ciśnienia podczas zasysania lub odprowadzania poziomów cieczy
ρ = gęstość cieczy
g = przyspieszenie ziemskie (9,81 m / s²)
H geo = statyczna różnica wysokości między poziomem cieczy w zbiorniku po stronie ssawnej i tłocznej
H l, tot = całkowita strata tarcia w rurze między wlotem a wylotem
v in , v out = średnie prędkości przepływu w zbiornikach po stronie ssącej i tłocznej
Zgodnie z prawem ciągłości, średnie prędkości przepływu w zbiornikach po stronie ssącej i ciśnieniowej są przeważnie nieznacznie małe i mogą być pominięte, jeśli powierzchnie zbiorników są stosunkowo duże w porównaniu z powierzchniami rurociągów. W tym przypadku powyższy wzór jest uproszczony do:
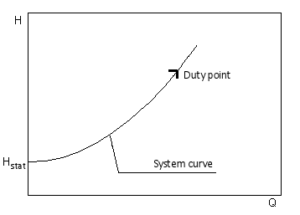
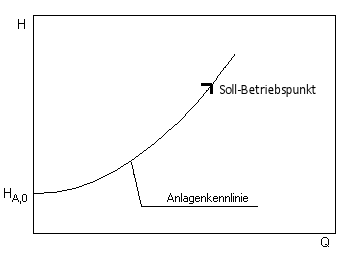
 Część statyczna charakterystyki systemu, czyli część niezależna od prędkości przepływu, a tym samym od natężenia przepływu, to:
Część statyczna charakterystyki systemu, czyli część niezależna od prędkości przepływu, a tym samym od natężenia przepływu, to:
 W przypadku systemów zamkniętych ta wartość wynosi zero.
Całkowita wielkość strat składa się ze strat ze wszystkich elementów linii ssącej i ciśnieniowej. Przy wystarczająco dużych liczbach REYNOLDS jest proporcjonalna do kwadratu strumienia objętości.
W przypadku systemów zamkniętych ta wartość wynosi zero.
Całkowita wielkość strat składa się ze strat ze wszystkich elementów linii ssącej i ciśnieniowej. Przy wystarczająco dużych liczbach REYNOLDS jest proporcjonalna do kwadratu strumienia objętości.
 g = przyspieszenie ziemskie (9,81 m / s²)
H l, tot = całkowita utrata tarcia między wejściem a wyjściem
v i = średnie prędkości przepływu przez pole przekroju rury i
A i = charakterystyczna powierzchnia przekroju rury
ζ i = współczynnik strat tarcia dla rur, kształtek itp.
Q = natężenie przepływu
k = współczynnik proporcjonalności
W podanych warunkach można teraz określić parabolę charakterystyki systemu:
g = przyspieszenie ziemskie (9,81 m / s²)
H l, tot = całkowita utrata tarcia między wejściem a wyjściem
v i = średnie prędkości przepływu przez pole przekroju rury i
A i = charakterystyczna powierzchnia przekroju rury
ζ i = współczynnik strat tarcia dla rur, kształtek itp.
Q = natężenie przepływu
k = współczynnik proporcjonalności
W podanych warunkach można teraz określić parabolę charakterystyki systemu:
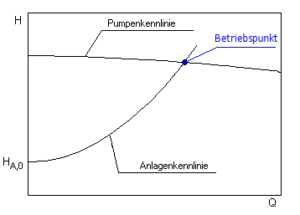
 Współczynnik proporcjonalności k jest określany na podstawie pożądanego punktu pracy. Przecięcie charakterystyki systemu z krzywą dławienia specyficzną dla pompy (charakterystyka pompy) przedstawia rzeczywisty punkt pracy.
Współczynnik proporcjonalności k jest określany na podstawie pożądanego punktu pracy. Przecięcie charakterystyki systemu z krzywą dławienia specyficzną dla pompy (charakterystyka pompy) przedstawia rzeczywisty punkt pracy.