Calcul de la caractéristique du système
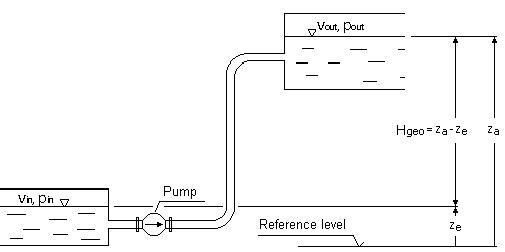
La hauteur manométrique nécessaire d'une pompe dans une canalisation non ramifiée est obtenue à partir de l'équation de BERNOULLI pour les écoulements stationnaires unidimensionnels de fluides incompressibles :

p in , p out = pressions lors de l'aspiration ou du refoulement des niveaux de liquide
= densité du liquide
g = accélération de la pesanteur (9,81 m/s²)
H geo = différence de hauteur statique entre le niveau de liquide des réservoirs côté aspiration et refoulement
H l, tot = perte de charge totale du tuyau entre l'entrée et la sortie
v in , v out = vitesses d'écoulement moyennes dans les réservoirs côté aspiration et refoulement
Selon la loi de continuité, les vitesses d'écoulement moyennes dans les réservoirs côté aspiration et refoulement sont pour la plupart insignifiantes et peuvent être négligées si les surfaces des réservoirs sont relativement grandes par rapport à celles des canalisations. Dans ce cas, la formule ci-dessus est simplifiée en :

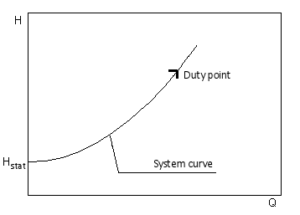
La partie statique de la caractéristique du système, c'est-à-dire la partie qui ne dépend pas de la vitesse d'écoulement et donc du débit, est :
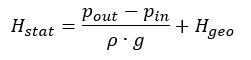
Pour les systèmes fermés, cette valeur est nulle.
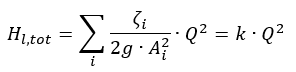
Le montant total des pertes est constitué des pertes de tous les composants des conduites d'aspiration et de refoulement. Avec des nombres de REYNOLDS suffisamment grands, il est proportionnel au carré du débit volumique.
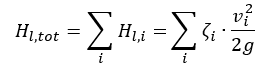
g = accélération de la pesanteur (9,81 m/s²)
H l, tot = perte de charge totale entre l'entrée et la sortie
v i = vitesses d'écoulement moyennes à travers la section transversale du tuyau i
A i = section caractéristique du tuyau
ζ i = coefficient de perte de charge pour les tuyaux, raccords, etc.
Q = débit
k = facteur de proportionnalité
Dans les conditions mentionnées, la parabole de la caractéristique du système peut maintenant être spécifiée :
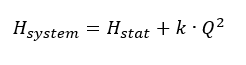
Le facteur de proportionnalité k est déterminé à partir du point de fonctionnement souhaité. L'intersection de la caractéristique du système avec la courbe d'étranglement spécifique à la pompe (caractéristique de la pompe) représente le point de fonctionnement réel.